Haptiknit
Self-Assembly Lab, MIT
In collaboration with CHARM Lab, Stanford University
2023
Self-Assembly Lab Team: Lavender Tessmer, Agnes Parker, Leke Ambali, Skylar Tibbits
CHARM Lab Team: Cosima du Pasquier, Ian Scholl, Liana Tilton, Allison Okamura
This project was generously supported by the National Science Foundation.
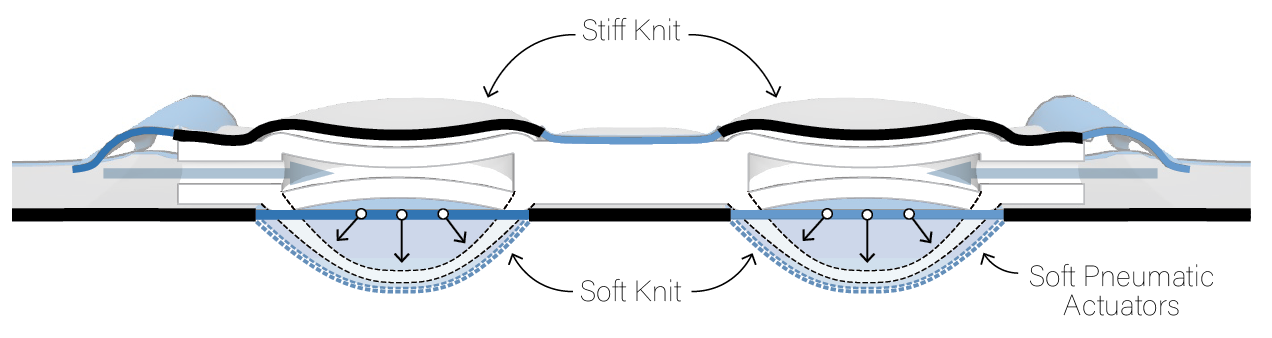
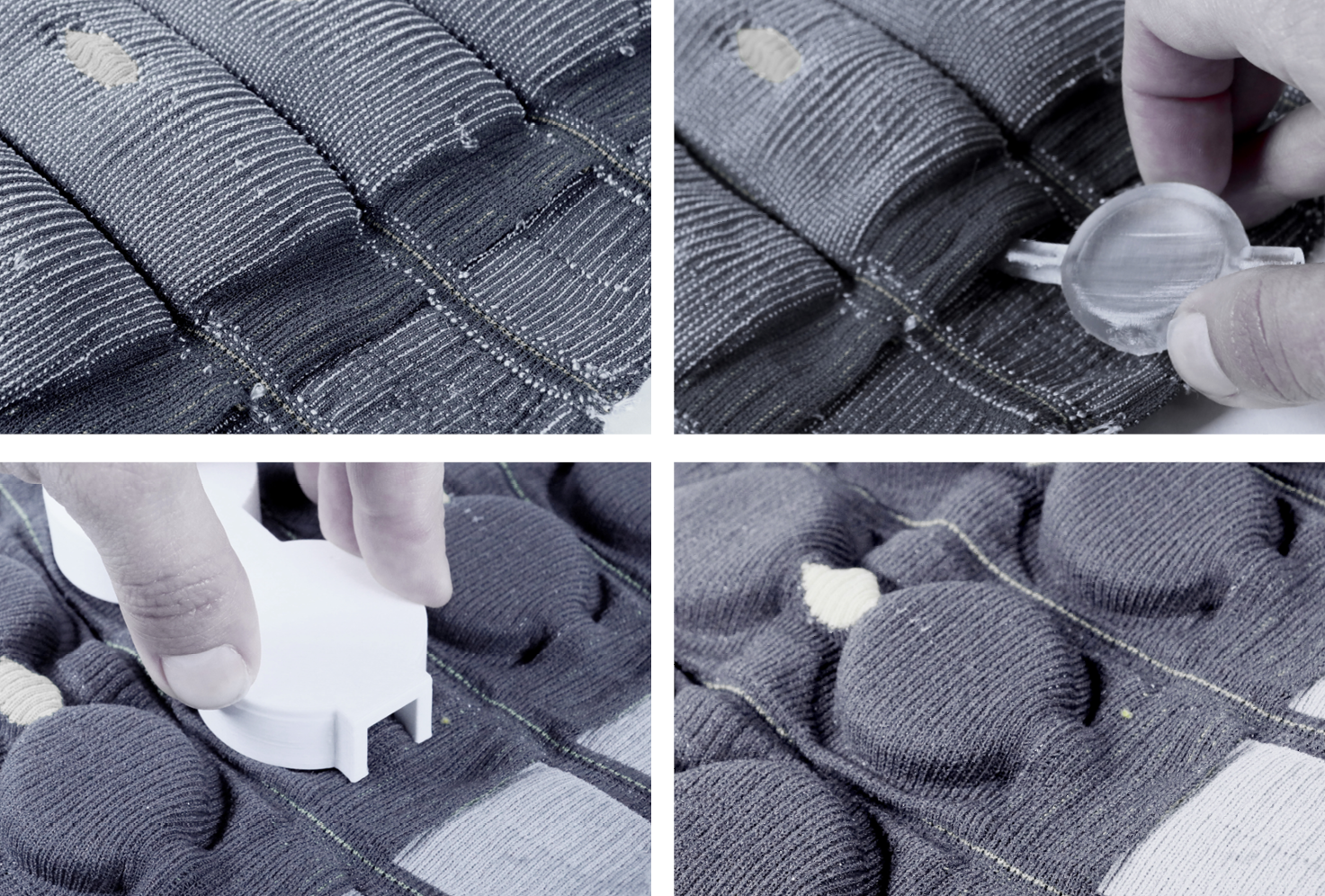
Kaptiknit demonstrates a new approach to the design and fabrication of soft wearable haptic devices that can be used for mediated social touch. Rather than rely on stiff frames to ensure load transmission, the deformation and load profiles are controlled through soft pneumatic actuators embedded within knit textiles of varying stiffness. The variation is achieved through a multi-layer industrially knit fabric with contrasting regions of elasticity and rigidity, which concentrates the forces of pneumatic actuators against the skin. The device is programmed to deliver social touch signals to the wearer.